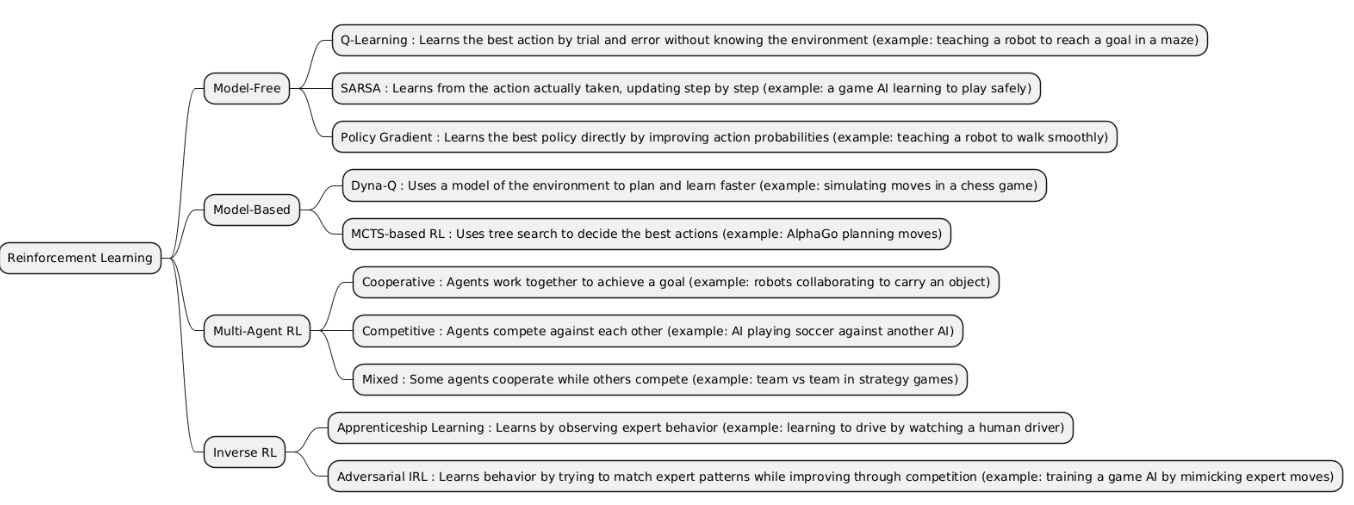
Reinforcement Learning is a type of machine learning where an agent learns to make decisions by interacting with an environment. The agent receives rewards or penalties based on its actions and aims to learn a strategy (policy) that maximizes cumulative rewards over time.
| Type | What it is | When it is used | When it is preferred over other types | When it is not recommended | Examples of projects that is better use it incide him |
|---|---|---|---|---|---|
| Model-Free | Model-Free Reinforcement Learning is a type of RL where the agent learns directly from experience (rewards and actions) without building a model of the environment’s dynamics. Examples: Q-Learning, SARSA, Policy Gradients. | Used when the environment is complex or unknown, and it’s hard to define how actions change states (no transition model available). |
• Better than Model-Based when the environment is unpredictable or too hard to simulate. • Better than Inverse RL when reward signals are clearly defined. • Better than Multi-Agent RL when only one agent acts in the environment. |
• When environment simulation is cheap or available (Model-Based would be faster). • When rewards are sparse or delayed (learning becomes slow). • When you need interpretability or planning ahead. |
• Autonomous game-playing agent (e.g., Atari, CartPole) using Q-Learning or DQN. • Robot navigation where the robot learns by trial and error. • Stock trading simulation where the agent learns profitable actions from rewards. |
| Model-Based | Model-Based Reinforcement Learning builds an internal model of the environment (predicting next state and reward) and uses it to plan optimal actions before executing them. | Used when the environment’s dynamics can be estimated or simulated, and you want faster learning with fewer real-world interactions. |
• Better than Model-Free when interactions are expensive (e.g., in robotics). • Better than Multi-Agent RL when there’s only one agent and full control. • Better than Inverse RL when rewards are known and well-defined. |
• When the environment is highly stochastic or complex to model accurately. • When the learned model is unreliable (leads to compounding errors). • When computation or storage for the model is limited. |
• Simulated robot arm control where the model predicts movement results before acting. • Autonomous driving simulators that plan ahead using a learned environment model. • Game AI that simulates possible moves before choosing the best one (like chess planning). |
| Multi-Agent RL | Multi-Agent Reinforcement Learning (MARL) involves multiple agents interacting within the same environment, each learning its own policy while considering others’ actions. | Used when tasks require cooperation, competition, or coordination between multiple decision-makers (agents). |
• Better than Model-Free or Model-Based when multiple agents must interact or share a space. • Better than Inverse RL when rewards are known and depend on multi-agent outcomes. • Ideal for environments with teamwork or competition (e.g., games, swarm control). |
• When only one agent exists (simpler RL methods suffice). • When agent interactions cause instability or non-stationary learning. • When training cost is too high due to many agents’ combinations. |
• Autonomous drone swarms coordinating to cover an area efficiently. • Multi-player game AI where agents learn cooperative or competitive strategies. • Traffic light control systems with multiple agents optimizing flow jointly. |
| Inverse RL | Inverse Reinforcement Learning (IRL) aims to learn the reward function behind an expert’s behavior instead of learning the policy directly. The agent observes demonstrations and infers what motivates them. | Used when the reward function is unknown or hard to define but expert demonstrations are available. |
• Better than Model-Free or Model-Based when it’s easier to collect expert examples than to handcraft a reward. • Better than Multi-Agent RL when only one expert agent exists. • Ideal for imitation or human-behavior modeling. |
• When rewards are already known (standard RL is simpler). • When expert data is noisy, biased, or limited. • When computational cost matters — IRL is usually expensive. |
• Autonomous driving imitation — learning driving rules from human drivers. • Robotic manipulation — robot learns tasks by observing human demonstrations. • Healthcare treatment planning — learning doctors’ decision patterns from patient data. |
import numpy as np
import random
n_states = 6
n_actions = 2
q_table = np.zeros((n_states, n_actions))
gamma = 0.8
alpha = 0.1
epsilon = 0.2
episodes = 50
def choose_action(state):
if random.uniform(0,1) < epsilon:
return random.choice([0,1])
else:
return np.argmax(q_table[state])
def get_next_state_reward(state, action):
if action == 0:
next_state = max(0, state-1)
else:
next_state = min(n_states-1, state+1)
reward = 10 if next_state == n_states-1 else 0
return next_state, reward
for ep in range(episodes):
state = 0
done = False
while not done:
action = choose_action(state)
next_state, reward = get_next_state_reward(state, action)
q_table[state, action] = q_table[state, action] + alpha * (
reward + gamma * np.max(q_table[next_state]) - q_table[state, action]
)
state = next_state
if state == n_states-1:
done = True
print("Learned Q-Table:")
print(q_table)
state = 0
steps = [state]
while state != n_states-1:
action = np.argmax(q_table[state])
state, _ = get_next_state_reward(state, action)
steps.append(state)
print("Path taken by learned policy:", steps)
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
n_states = 5
n_actions = 2
gamma = 0.99
class PolicyNet(nn.Module):
def __init__(self):
super().__init__()
self.fc = nn.Linear(n_states, n_actions)
def forward(self, x):
return torch.softmax(self.fc(x), dim=-1)
policy = PolicyNet()
optimizer = optim.Adam(policy.parameters(), lr=0.01)
def select_action(state):
state_tensor = torch.FloatTensor(state).unsqueeze(0)
probs = policy(state_tensor)
action = torch.multinomial(probs, 1).item()
return action, probs[0, action]
def get_next_state_reward(state, action):
next_state = min(max(0, state + (1 if action==1 else -1)), n_states-1)
reward = 1 if next_state == n_states-1 else 0
done = next_state == n_states-1
return next_state, reward, done
def one_hot(state):
vec = np.zeros(n_states)
vec[state] = 1
return vec
for episode in range(200):
state = 0
rewards = []
log_probs = []
done = False
while not done:
state_vec = one_hot(state)
action, prob = select_action(state_vec)
log_probs.append(torch.log(prob))
state, reward, done = get_next_state_reward(state, action)
rewards.append(reward)
discounted_rewards = []
R = 0
for r in reversed(rewards):
R = r + gamma * R
discounted_rewards.insert(0, R)
discounted_rewards = torch.FloatTensor(discounted_rewards)
loss = -torch.sum(torch.stack(log_probs) * discounted_rewards)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print("Training finished!")
state = 0
steps = [state]
while state != n_states-1:
state_vec = one_hot(state)
action, _ = select_action(state_vec)
state, _, _ = get_next_state_reward(state, action)
steps.append(state)
print("Path taken by learned policy:", steps)
import math
import random
n_states = 5
n_actions = 2
goal_state = 4
def get_next_state_reward(state, action):
next_state = min(max(0, state + (1 if action == 1 else -1)), n_states-1)
reward = 1 if next_state == goal_state else 0
done = next_state == goal_state
return next_state, reward, done
class Node:
def __init__(self, state, parent=None):
self.state = state
self.parent = parent
self.children = {}
self.visits = 0
self.value = 0.0
def ucb1(node, child):
if child.visits == 0:
return float('inf')
return child.value / child.visits + math.sqrt(2 * math.log(node.visits) / child.visits)
def tree_policy(node):
for action in range(n_actions):
if action not in node.children:
next_state, _, _ = get_next_state_reward(node.state, action)
node.children[action] = Node(next_state, node)
return node.children[action]
ucb_values = [ucb1(node, child) for child in node.children.values()]
best_action = list(node.children.keys())[ucb_values.index(max(ucb_values))]
return node.children[best_action]
def default_policy(state):
total_reward = 0
steps = 0
done = False
while not done and steps < 10:
action = random.choice([0,1])
state, reward, done = get_next_state_reward(state, action)
total_reward += reward
steps += 1
return total_reward
def backup(node, reward):
while node is not None:
node.visits += 1
node.value += reward
node = node.parent
def mcts(root, iterations=50):
for _ in range(iterations):
node = tree_policy(root)
reward = default_policy(node.state)
backup(node, reward)
action_visits = {action: child.visits for action, child in root.children.items()}
best_action = max(action_visits, key=action_visits.get)
return best_action
state = 0
steps = [state]
while state != goal_state:
root = Node(state)
action = mcts(root, iterations=50)
state, _, _ = get_next_state_reward(state, action)
steps.append(state)
print("Path found by MCTS-based agent:", steps)
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import random
n_states = 5
n_actions = 2
goal_state = 4
def get_next_state(state, action):
next_state = min(max(0, state + (1 if action == 1 else -1)), n_states-1)
return next_state
expert_demo = [0,1,2,3,4]
def one_hot(state):
vec = np.zeros(n_states)
vec[state] = 1
return vec
class PolicyNet(nn.Module):
def __init__(self):
super().__init__()
self.fc = nn.Linear(n_states, n_actions)
def forward(self, x):
return torch.softmax(self.fc(x), dim=-1)
class Discriminator(nn.Module):
def __init__(self):
super().__init__()
self.fc = nn.Sequential(
nn.Linear(n_states + n_actions, 16),
nn.ReLU(),
nn.Linear(16,1),
nn.Sigmoid()
)
def forward(self, state, action):
x = torch.cat([state, action], dim=-1)
return self.fc(x)
policy = PolicyNet()
discriminator = Discriminator()
policy_opt = optim.Adam(policy.parameters(), lr=0.01)
disc_opt = optim.Adam(discriminator.parameters(), lr=0.01)
loss_fn = nn.BCELoss()
for epoch in range(200):
state = 0
agent_states = []
agent_actions = []
while state != goal_state:
state_vec = torch.FloatTensor(one_hot(state)).unsqueeze(0)
probs = policy(state_vec)
action = torch.multinomial(probs, 1).item()
action_vec = torch.zeros((1,n_actions))
action_vec[0, action] = 1
agent_states.append(state_vec)
agent_actions.append(action_vec)
state = get_next_state(state, action)
expert_states = [torch.FloatTensor(one_hot(s)).unsqueeze(0) for s in expert_demo[:-1]]
expert_actions = []
for i in range(len(expert_demo)-1):
act_vec = torch.zeros((1,n_actions))
act_vec[0,1] = 1
expert_actions.append(act_vec)
disc_opt.zero_grad()
agent_preds = torch.cat([discriminator(s,a) for s,a in zip(agent_states, agent_actions)])
expert_preds = torch.cat([discriminator(s,a) for s,a in zip(expert_states, expert_actions)])
agent_labels = torch.zeros_like(agent_preds)
expert_labels = torch.ones_like(expert_preds)
loss = loss_fn(agent_preds, agent_labels) + loss_fn(expert_preds, expert_labels)
loss.backward()
disc_opt.step()
policy_opt.zero_grad()
rewards = torch.cat([discriminator(s,a) for s,a in zip(agent_states, agent_actions)])
policy_loss = -torch.sum(torch.log(rewards + 1e-8))
policy_loss.backward()
policy_opt.step()
state = 0
steps = [state]
while state != goal_state:
state_vec = torch.FloatTensor(one_hot(state)).unsqueeze(0)
probs = policy(state_vec)
action = torch.multinomial(probs,1).item()
state = get_next_state(state, action)
steps.append(state)
print("Path learned by AIRL agent:", steps)